Veramente orami e' qualche mese che ho ricevuto dalla Cina il mio primo ESP32Cam, un mostriciattolo che ha a bordo il ESP32 uno slot per MicroSD card, una telecamera ed una serie di pin a cui poter collegare il ....resto del mondo!
Ho gia' fatto un sacco di progettini con l'ESP32, tutti in C, utilizzando la IDE di Arduino e la modalita' "classica" di programmazione: upload via seriale del firmware compilato attraverso la Ide di Arduino .
Su questo sistema di operare, ci sono in rete migliaia di Tutorial anche blasonati, come per esempio quelli di Adafruit, mentre per quanto riguarda Python e MicroPython, ancora non si trova un granche'.
Considerato pero' che ho imparato a programmare con Python, vorrei imparare anche a sviluppare qualcosa di mio su ESP con questo linguaggio.
Quindi , vediamo un po' come fare per far diventare produttiva la giornata!
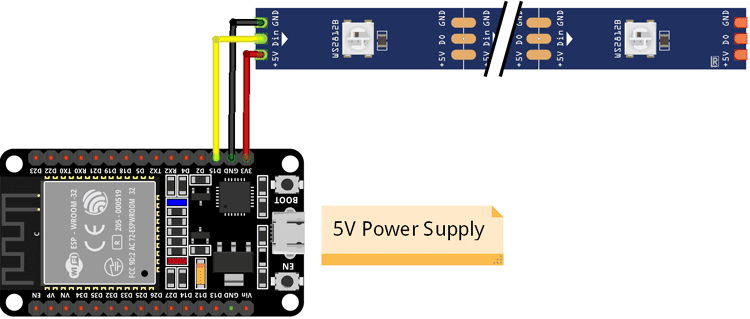
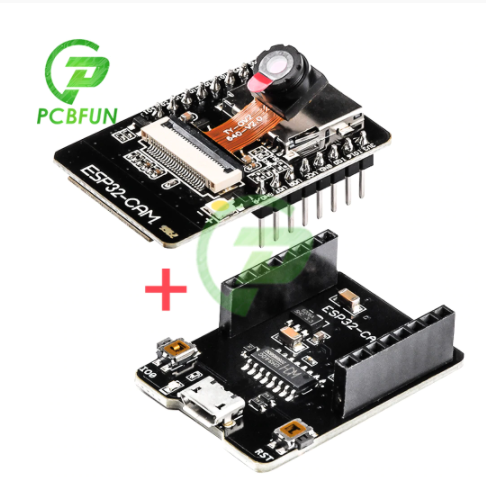
Intanto, primo consiglio, in rete si trovano diverse fonnti che vendono la scheda ESP32Cam, io consiglio quella completa della sua basetta con presa USB e interfaccia seriale integrata, che e' molto comoda, viene riconosciuta subito dal sistema operativo, e ci evita di dover ricorre a fili volanti e interfacce seriali posticce, per poter lavorare. Costa pochissino (meno di 1 euro) e non ci sono motivi per non utilizzarla, almeno per la fase di prototipazione, quando fare l'upload del firmware e' una operazione frequente. Quando la parte di sviluppo sara' terminata, se volessimo utilizzare bene gli spazi, potremmo sempre sfilare la basetta seriale e, magari costruirne una apposita con i sensori di cui necessitiamo gia' previste e montati onboard.Quindi nel caso si volesse optare per la soluzione con scheda seriale esterna questi sono le connessioni da effettuare:

Il ponticello tra GPIO0 e GND e' indispensabile per "dire" al microcontrollore che siamo in flash mode e che stiamo per inviare il firmware.
Recuperare l'ultima versione del firmware dal sito
Dal alto pc, se siamo su Linux, il comando per fare upload del sistema operativo MicroPython si deve utilizzare :
$ esptool.py –chip esp32 -p <nome_porta> write_flash -z 0x1000 <path_del_firmware>
Se siamo su windows ed abbiamo difficolta' ad installare il sistema di siluppo di Espressif (esptools), possiamo :
Scaricare il Flash Dowload Tools qui ( questa e' l'ultima versione, prebdere ovviamente la versione piu' recente) basta scompattarlo in una cartella ed siamo subito operativi.
Fare click sul file flash_download_tool_3.8.5.exe e scegliere il tasto Developer Mode e nella successiva finestra il tasto relativo al modello di ESP che abbiamo a disposizione.
Si aprira' questa finestra:
All'interno della quale va soltanto caricato il path del firmware appena scaricato del MicroPython. Gli altgri parametri dovrebbero andare bene senza essere toccati.
A questo punto fare ERASE per cancellare la memoria flash da alti eventuali upload.
Poi START, per iniziare l'upload.
Se tutto e' andato bene. ci trovermo, al termine del processo, il nostro ESP32Cam che sara' pronto per essere programmato in Python. Bastera' quindi collegarlo con PuTTY (per esempio) sulla porta COM che windows gli avra' assegnato. nel mio caso la COM10.
Alla prima connessione il nostro ESP rispondera' con il prompt di Python e sara' gia' pienamente operativo.
Cosa fare adesso?
Adesso abbiamo il mostriciattolo che risponde ai comandi, ma ancora non e' collegato alla rete e non puo' essere collegato da remoto. Quindi la prima cosa da fare e' farlo collegare alla rete.
Ci viene in aiuto la documentazione ufficiale di MicroPython per ESP32
import network
wlan = network.WLAN(network.STA_IF) # create station interface
wlan.active(True) # activate the interface
wlan.scan() # scan for access points
wlan.isconnected() # check if the station is connected to an AP
wlan.connect('essid', 'password') # connect to an AP
wlan.config('mac') # get the interface's MAC address
wlan.ifconfig() # get the interface's IP/netmask/gw/DNS addresses
ap = network.WLAN(network.AP_IF) # create access-point interface
ap.config(essid='ESP-AP') # set the ESSID of the access point
ap.config(max_clients=10) # set how many clients can connect to the network
ap.active(True) # activate the interfaceFatta la connessione al router casalingo (modificare opportunamente essid e password nel codice sopra con quelli corretti per la connessione al proprio router)
Attiviamo il WEBREPL per poter effettuare la connessione da remoto ed utilizzare la funzionalita' di upload e download dei file dal sistema operativo del ESP32Cam ( si perche' il sistema che abbiamo caricato si comporta come un vero e proprio sistema operativo sul quale possiamo caricare, scrivere leggere e cancellare file.
PS Se utilizziamo Linux e' tutto piu' semplice, come sempre, esiste infatti una applicazione ampy che basta chiamare per fare direttamente l'upload da terminale cosi:
$ ampy -p dev/ttyUSB0 put boot.py
Ma stiamo utilizzando windows, mio malgrado, quindi , secondo me, la maniera piu' veloce per ottenere il buon funzionamento del ESP32Cam e' questo, cioe' passare da WEBREPL per fare l'upload dei file che ci interessa caricare sul sistema.
import webrepl_setup
Con questa riga, e poi seguendo le richieste del programma, si stabilisce una password e si abilita la partenza del WEBREPL ad ogni restart o reset del sistema.
Proviamo se tutto funziona a dovere:
Da un qualsiasi browser connettere: http://micropython.org/webrepl/#1p2.168.NUMERO_IP_ESP:8266/
Inserire naturalmente l' IP dell'ESP32Cam, ed utilizzare la porta 8266 come specificato. Dovrebbe rispondere il nuovo sistema con la richiesta diella password di accesso che abbiamo creato con la prima chiamata del WEBREPL. Dare la password corretta ed il sistema rispondera' con il prompt di MicroPython
Ok a questo punto che siamo connessi e abbiamo il WEBREPL attivato, non ci resta altro che rendere queste modifiche permanenti in maniera che ad ogni statup del sistema questo si connetta al router in automatico e renda disponibile l'interfaccia remota per poter essere contattato anche se non direttamente collegato al pc.
Dal WEBREPL scarichiamo il file boot.py e modifichiamo la parte relativa ala connessione, per renderla automatica cosi:
fare il get del file boot.py
modificarlo con :
<code>
# This file is executed on every boot (including wake-boot from deepsleep)
import esp
esp.osdebug(None)
import webrepl
webrepl.start()
def do_connect():
import network
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
if not wlan.isconnected():
print('connecting to network...')
wlan.connect('essid', 'password')
while not wlan.isconnected():
pass
print('network config:', wlan.ifconfig())
do_connect()
</code>
E fare l'upload del file appena modificato con l'apposita funzione disponibile sul browser
A questo punto siamo pronti. Basta resettare (anche togliendo l'alimentazione) il nostro ESP32Cam ed al riavvio, in automatico si collleghera' al router e sara' connettibile tramite interfaccia WEBREPL all'indirizzo : IP_del_ESP:8266 da un qualsiasi browser.
Buon divertimento
TecnoGeppetto